- 长臂猿-企业应用及系统软件平台
机器之心专栏
本文介绍了一篇由国防科技大学刘煜教授团队和浙江大学周晓巍教授团队联合撰写的论文《Long-term Visual Localization with Mobile Sensors》,该论文已被计算机视觉与模式识别领域顶尖国际会议 CVPR 2023 录用。

 ,图像检索任务需要在参考图像集
,图像检索任务需要在参考图像集 里找到与查询图有共视关系的图像子集:
里找到与查询图有共视关系的图像子集: 
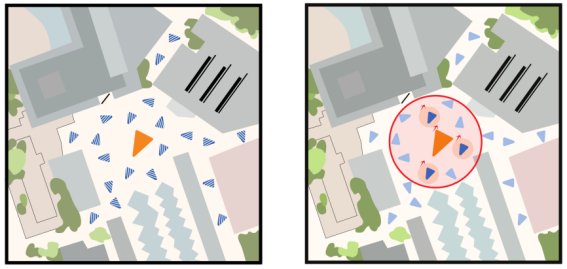
 ,其位置分量来源于 GPS,旋转分量来自于重力计和指南针方向的集成。查询图像只需要在图像子集
,其位置分量来源于 GPS,旋转分量来自于重力计和指南针方向的集成。查询图像只需要在图像子集  中检索共视邻居
中检索共视邻居

 表示经纬度的 x-y 坐标,
表示经纬度的 x-y 坐标, 表示相机的主轴方向。
表示相机的主轴方向。 和共视邻居
和共视邻居  ,2D-3D 匹配任务需要建立 像素点与
,2D-3D 匹配任务需要建立 像素点与  能观察到的局部点云
能观察到的局部点云  之间的 2D-3D 对应关系。
之间的 2D-3D 对应关系。 和参考图
和参考图  的粗(用
的粗(用  表示)、细(用
表示)、细(用  表示)粒度特征,然后将局部点云
表示)粒度特征,然后将局部点云  投影在参考特征图上并进行插值、平均,得到点云特征。
投影在参考特征图上并进行插值、平均,得到点云特征。 ,概率匹配矩阵
,概率匹配矩阵  表示为
表示为
 表示为
表示为
 为互最近邻,
为互最近邻, 为预设阈值。
为预设阈值。
 ,通过将点云的细粒度特征
,通过将点云的细粒度特征 与在
与在  附近裁剪出细粒度窗口特征
附近裁剪出细粒度窗口特征  进行点乘,得到匹配概率并计算二维位置期望,获取查询图像的亚像素
进行点乘,得到匹配概率并计算二维位置期望,获取查询图像的亚像素  与局部点云 的精确对应关系。
与局部点云 的精确对应关系。 ,其与传感器位姿
,其与传感器位姿  在重力方向
在重力方向  上差值为
上差值为
 预先过滤掉大部分错误位姿,实现更高效、鲁棒的位姿解算。
预先过滤掉大部分错误位姿,实现更高效、鲁棒的位姿解算。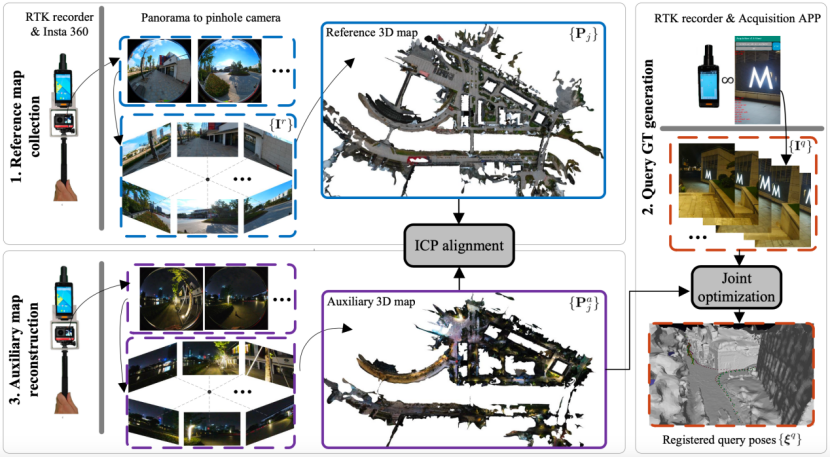
 。相较于单目相机,全景相机具有更高的采集效率。将 7,958 张全景图像切分并转换为针孔模型后,该数据集包括 47,780 张参考图像。为了确定模型尺度并与地理坐标系保持一致,该研究预先在全景相机上绑定了一个 RTK 记录仪,以记录绝对地理坐标。
。相较于单目相机,全景相机具有更高的采集效率。将 7,958 张全景图像切分并转换为针孔模型后,该数据集包括 47,780 张参考图像。为了确定模型尺度并与地理坐标系保持一致,该研究预先在全景相机上绑定了一个 RTK 记录仪,以记录绝对地理坐标。 。三维辅助地图的构建方法与三维参考地图类似,同样使用全景相机和 RTK 记录仪进行采集,并采用 ICP 技术进行对齐。基于三维辅助地图生成查询图像的伪真值等同于基于三维参考地图生成的伪真值。论文设计了一套联合优化方法生成伪真值,优化项包括:1)图像自定位约束;2)序列图像的相对位姿约束;3)IMU 的运动约束;4)其他先验约束,如重力方向和 RTK 位置。
。三维辅助地图的构建方法与三维参考地图类似,同样使用全景相机和 RTK 记录仪进行采集,并采用 ICP 技术进行对齐。基于三维辅助地图生成查询图像的伪真值等同于基于三维参考地图生成的伪真值。论文设计了一套联合优化方法生成伪真值,优化项包括:1)图像自定位约束;2)序列图像的相对位姿约束;3)IMU 的运动约束;4)其他先验约束,如重力方向和 RTK 位置。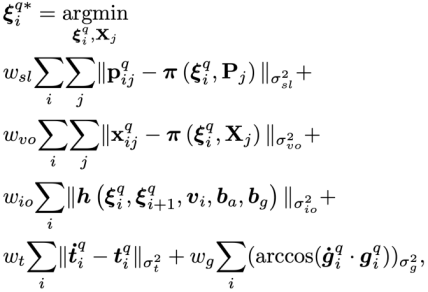


© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
本文来自机器之心