- 长臂猿-企业应用及系统软件平台
机器之心专栏
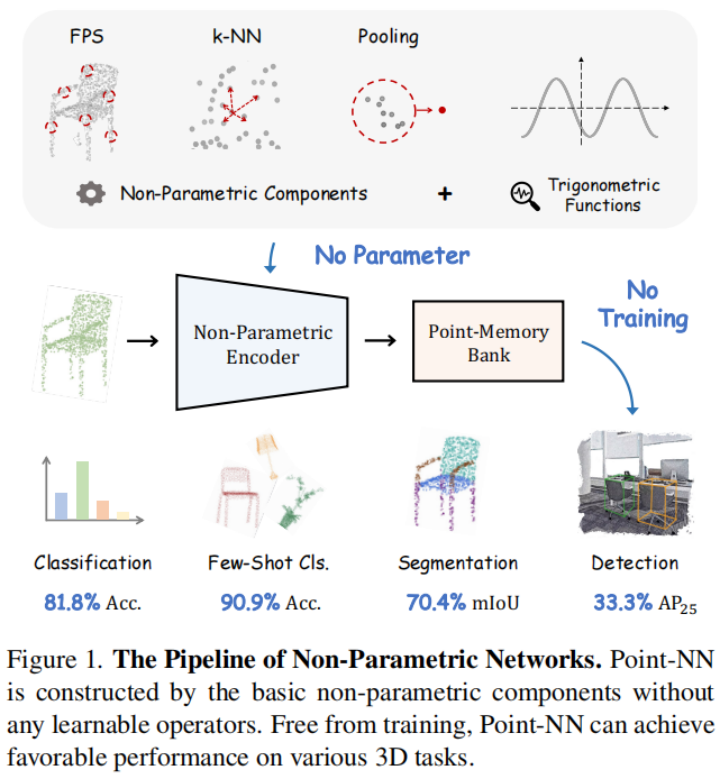
不引入任何可学习参数或训练,是否可以直接实现 3D 点云的分类、分割和检测?




 ,利用三角函数将它嵌入到一个维向量中:
,利用三角函数将它嵌入到一个维向量中:
 分别表示三个轴的位置编码。以
分别表示三个轴的位置编码。以 为例,对于通道索引
为例,对于通道索引 ,具体的位置编码公式如下:
,具体的位置编码公式如下:
 ,我们采用 k-NN 去找到他的 k 个邻域点
,我们采用 k-NN 去找到他的 k 个邻域点 以及对应的特征
以及对应的特征 。基于此,我们将中心点特征
。基于此,我们将中心点特征 和在特征维度进行拼接,实现特征扩维,这样可以在更深的网络层中编码更多的语义信息:
和在特征维度进行拼接,实现特征扩维,这样可以在更深的网络层中编码更多的语义信息:
 的坐标进行归一化,并使用三角函数进行相对位置
的坐标进行归一化,并使用三角函数进行相对位置 的编码,来获取的相对几何权重,标记为
的编码,来获取的相对几何权重,标记为 。之后,我们通过下面的公式得到加权后的邻域特征
。之后,我们通过下面的公式得到加权后的邻域特征 。
。


 和一个 label memory
和一个 label memory 。以点云分类任务为例,假设给定的训练集包含 K 个类别的 N 个点云
。以点云分类任务为例,假设给定的训练集包含 K 个类别的 N 个点云 。通过 Non-Parametric Encoder 可以得到 N 个训练集点云的全局特征,同时将对应的分类标签
。通过 Non-Parametric Encoder 可以得到 N 个训练集点云的全局特征,同时将对应的分类标签 转换为 one-hot 编码,接着将它们沿着样本维度进行拼接,缓存为两个矩阵。
转换为 one-hot 编码,接着将它们沿着样本维度进行拼接,缓存为两个矩阵。
 ,并计算与 feature memory 之间的余弦相似度。
,并计算与 feature memory 之间的余弦相似度。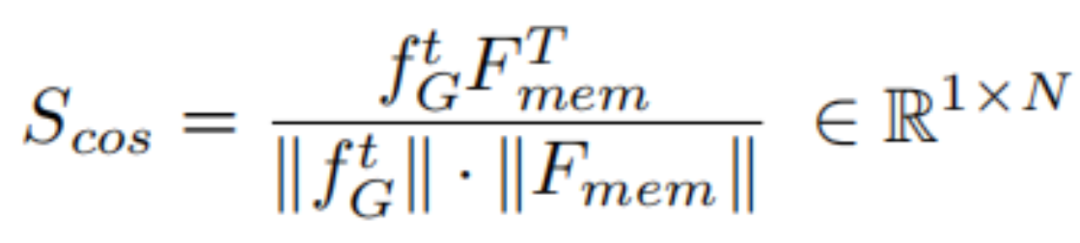
中的 one-hot 标签与 进行加权,越相似的 feature memory 对最终的分类 logits 贡献越大,反之亦然。
进行加权,越相似的 feature memory 对最终的分类 logits 贡献越大,反之亦然。





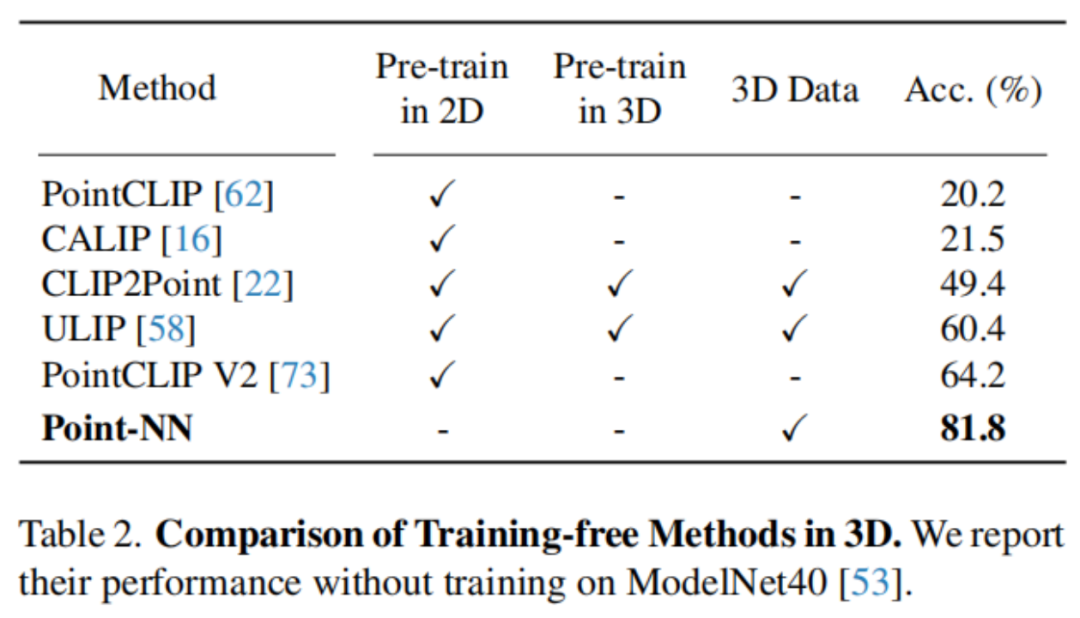
 和 11.05%
和 11.05% 。
。
 和
和 ,首先获取它们的 C 维的位置编码,公式如下:
,首先获取它们的 C 维的位置编码,公式如下: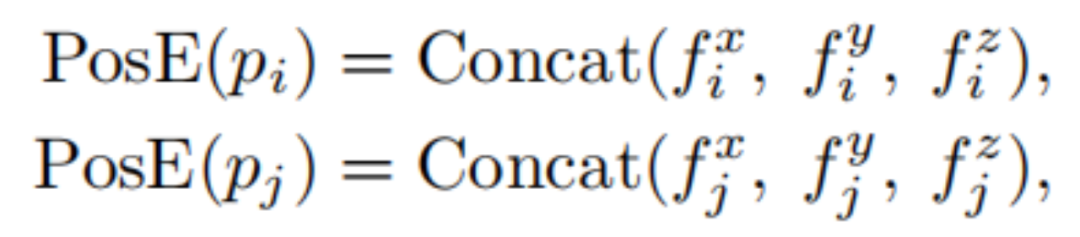




© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com